

Detección de peatones para sistemas avanzados de asistencia al conductor
Los sistemas de asistencia al conductor, y particularmente los sistemas de protección de peatones, representan uno de los campos de investigación más activos dedicados a la mejora de la seguridad vial. El mayor desafío es el desarrollo de sistemas a bordo fiables de detección de peatones. En esta revisión del estado de la técnica de la detección de peatones, se divide el problema en diferentes etapas, cada una con responsabilidades propias dentro del sistema. Esta división facilita el posterior análisis y discusión de cada uno de los métodos en la literatura, favoreciendo la comparación entre ellos. Finalmente se discuten los temas más importantes de este campo poniendo especial énfasis en las necesidades actuales y los desafíos futuros.
A lo largo del siglo XX los automóviles experimentaron un espectacular aumento en su popularidad, lo cual finalmente ha resultado en que los accidentes de tráfico representan una importante causa de muertes. Según estudios de Naciones Unidas, cada año se producen 150.000 heridos y 7.000 muertos en la Unión Europea, sólo en accidentes vehículo-peatón. Con el objetivo de reducir estas estadísticas, tanto la industria del automóvil como la comunidad científica han investigado las posibles vías de incremento de la seguridad. Algunos ejemplos de las tecnologías desarrolladas son los cinturones de seguridad, el airbag o los más recientes sistemas electrónicos de estabilidad. Actualmente el campo más prometedor es el de los sistemas de asistencia al conductor (en inglés advanced driver assistance systems, ADAS), los cuales no sólo proporcionan información útil sino que incluso pueden realizar acciones sobre el vehículo en caso de peligro.
Este artículo presenta una revisión del estado del arte en un tipo particular de ADAS: los sistemas de protección de peatones. La dificultad en la detección de peatones viene dada principalmente por la variabilidad en su apariencia (diferentes ropas, tamaños, siluetas, etc.) así como por el entorno no-estructurado en que se encuentran (escenarios dinámicos como consecuencia del propio movimiento del vehículo así como el movimiento del resto de objetos en la carretera). Las primeras investigaciones en este campo se llevaron a cabo en la década de 1990, y hasta el momento se han presentado centenares de nuevas técnicas, algoritmos y sistemas. Una de las metodologías tradicionalmente empleadas para revisar la literatura en el campo ha sido la de enumerar los artículos uno por uno, analizando sus ventajas y desventajas. Lamentablemente esta aproximación al problema resulta larga y poco concluyente dada la cantidad de trabajos. Nuestra propuesta consiste en primero dividir los sistemas en una serie de etapas genéricas, para después clasificar y analizar las técnicas en cada una de éstas. Esto proporciona un esquema de comparación general sobre el cual se discute cada aspecto de los algoritmos al mismo tiempo de acuerdo con su papel en el sistema.
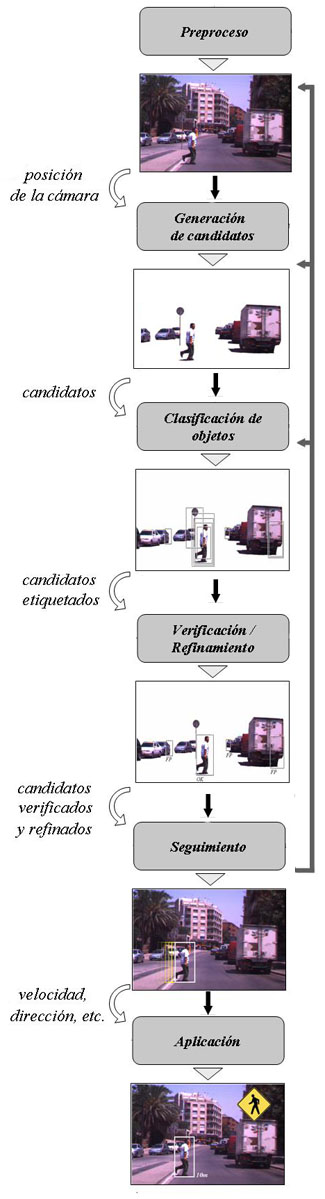
La arquitectura propuesta consiste de seis etapas. A continuación enumeramos cada una de ellas, junto a una breve descripción de su rol en el sistema y la técnica más empleadas en éstas.
• Preproceso. Incluye tareas como el ajuste del tiempo de exposición o la calibración de la cámara.
• Generación de candidatos. Selecciona ventanas de interés en las que es muy posible que exista un peatón, descartando la mayor parte de fondo pero sin perder peatones. Los principales algoritmos actuales son la búsqueda exhaustiva, la búsqueda en el plano carretera y la segmentación estéreo.
• Clasificación. Etiqueta las ventanas candidatas usando técnicas de análisis de patrones. Es quizá la etapa más investigada dado su solapamiento con campos genéricos como la detección y categorización de objetos. Se emplean algoritmos de aprendizaje como redes neuronales, AdaBoost o SVM, y características como los wavelets de Haar, histogramas de gradientes, contornos o siluetas.
• Verificación y refinamiento. Verifica las ventanas etiquetadas como peatón (normalmente se usan criterios como la silueta o el estéreo) y agrupa múltiples ventanas solapadas pertenecientes al mismo peatón (el algoritmo de clústering Mean-Shift es uno de los más populares).
• Seguimiento. Sigue las ventanas positivas para estimar su dirección, velocidad así como su posición espacial en el futuro. El filtro de Kalman es el más empleado en esta etapa.
• Aplicación. Proporciona decisiones de alto nivel haciendo uso de los datos de las anteriores etapas, por ejemplo alertar al conductor en caso de peligro de atropello o frenar el vehículo.
La principal conclusión de la revisión es que aunque el esfuerzo realizado durante la última década en este campo ha sido realmente productivo, aún estamos lejos de del sistema ideal. Todavía hay mucho trabajo que hacer hasta conseguir el rendimiento requerido para los sistemas en serie. Por ejemplo, se han realizado grandes avances en la etapa de clasificación, pero la responsabilidad de llegar a sistemas de alta fiabilidad ha de ser también compartida por los algoritmos de generación de candidatos o de seguimiento. De todos modos, atendiendo al desarrollo en este campo, somos optimistas respecto a sus futuros logros.
Esta investigación ha sido llevada a cabo por los investigadores David Gerónimo, Antonio M. López y Angel D. Sappa del grupo de sistemas avanzados de asistencia al conductor (ADAS) del Centre de Visió per Computador (Universitat Autònoma de Barcelona) y Thorsten Graf del departamento de Electronics Research de Volkswagen AG. La investigación ha sido financiada por los proyectos TRA2007-62526/AUT, Consolider Ingenio 2010: MIPRCV, (CSD200700018) y la beca predoctoral BES-2005-8864 del Ministerio de Educación y Ciencia y el Fondo Social Europeo.
Referencias
"Survey of pedestrian detection for advanced driver assistance systems", D. Gerónimo, A.M. López, A.D. Sappa and T. Graf, IEEE Transactions on Pattern Analysis and Machine Intelligence, Vol. 32, Num. 7, pp. 1239-125, July 2010.
